Exemple n°2: clignotement d'une LED en creant des retards dans le PIC
Voici le schema de cablage, vous pouvez réaliser ce petit montage sur plaquette d'essais:
Explications et conseils: C3, C4, et le Quartz 4MHz servent pour l'horloge du PIC
C2 sert à découpler l'alimentation (alim plus stable).
N'oubliez pas de relier la patte RESET au +5V.
Attention l'alimentation doit etre de bonne qualité et valoir de 4.5V à 5.5V
La norme voudrait qu'on relie toutes les entrées inutilisées à un potentiel (masse ou +5V). C'est à faire si vous voulez que le PIC consomme moins ...Le cablage sur plaque d'essais:
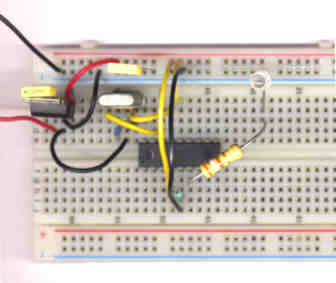
(remarque: le composant que vous voyez en haut à gauche est un regulateur de tension. Il n'est pas necessaire, dés l'instant ou votre alim sort du +5V d'une qualité correcte)Vous pouvez cliquer ici pour telecharger le programme (au format .asm. Il faudra le compiler avec MPASM. Regardez les pages precedentes pour plus d'informations)
list p=16f84,f=inhx8m __config B'11111111110001' #include "p16f84a.inc" temp1 equ H'0C' temp2 equ H'0D' bsf STATUS,RP0 movlw B'11111110' movwf TRISB bcf STATUS,RP0 clrf temp1 Debut movlw D'244' movwf temp2 Boucle nop decfsz temp1,1 goto Boucle decfsz temp2,1 goto Boucle comf PORTB,1 goto Debut endPrincipe de fonctionnement du programme:
Le cycle d'horloge, c'est a dire le temps pour executer une ligne est d'1µs (0.000001s)
Le temps d'attente entre chaque changement d'etat de la LED est donc:
(1 + 1 + 2)µs * 256 * 244 = 0.2498 secondes = 0.25 secondes.
le premier "1" est pour le nop
le second "1" est pour le decfsz temp1,1
le "2" est pour le goto Boucle, en effet les instructions goto prennent 2µs
ce retard est executé "256" fois.
toutes les 256 fois, on decremente temp2 qui a ete initialisé à 244.
le retard est donc executé "256 * 244" fois.
Notez que le calcul est approximatif, mais tout de meme tres proche de la realité. En effet, toute les 256 fois, le temps de retard n'est pas le meme.
Détaillons la fonction de chaque ligne de ce programme:
list p=16f84,f=inhx8m: permet de dire au compilateur le type de PIC utilisé (16F84), et indique le format de fichier.
__config B'11111111110001': configure le PIC pour que le code ne soit pas protégé, on utilise la temporisation de démarage, on n'utilise pas le chien de garde, et oscillateur à quartz.
#include "p16f84a.inc": Ce fichier qui est fournit avec le compilateur de Microchip contient la définition des instructions que vous écrivez. Grace à ce fichier, le compilateur va pouvoir traduire les insctruction que vous écrivez en chiffres comprehensibles par le PIC.
temp1 equ H'0C': Définition d'une variable: temp1 est le nom de la variable; H'0C' est l'adresse de la RAM à laquelle est stockée cette variable. A chaque fois que le PIC aura a faire avec cette variable, il modifiera le contenu a l'adresse 0C de la RAM.
Par exemple lors de l'execution de l'instruction "movwf temp1" le PIC va mettre le contenu de la variable W à l'adresse H'0C' de la RAM.temp2 equ H'0C': Définition d'une variable: temp2 est le nom de la variable; H'0D' est l'adresse de la RAM à laquelle est stockée cette variable. A chaque fois que le PIC aura a faire avec cette variable, il modifiera le contenu a l'adresse 0D de la RAM.
bsf STATUS,RP0: Sert à choisir la zone memoire n°1 (page 1). Cette zone memoire contient un certain nombre de registres de configuration (= variables pour configurer le PIC). En clair, pour pouvoir configurer le PIC, il faut generalement passer dans la zone memoire n°1 (bank 1), car c'est la que se trouvent la majorité des registres de configuration.
movlw B'11111110': On transfert la valeur binaire 10000111 dans le registre de travail W.
Je rapelle que W est une variable "à tout faire". C'est par exemple elle qui sert à transferer une valeur dans une variable.movwf TRISB: On met W dans TRISB.
Cette variable permet de définir quelles pattes sont en entrée, et quelles pattes sont en sortie. Le port B comporte 8 pattes (n°6 à n°13), Chaque bit de TRISB à 1 configure une patte en entrée, et chaque bit à 0 configure une patte en sortie. Ici, seul la patte 6 (bit 0 de port B) est en sortie. C'est sur cette patte qu'on branche la LED.
Notez que par defaut toutes les pattes du port A et B sont configurées en entrée (TRISB vaut B'11111111' par defaut).bcf STATUS,RP0: Maintenant que toutes les configurations sont finies, on repasse dans le zone memoire n°0, et on va commencer le programme en lui meme.
clrf temp1: met à zero la variable temp1: 0 -> temp1.
Debut: C'est un label. On pourrait le comparer à une borne kilometrique qui sert à savoir à quel endroit on est sur une route.
Dans le cas du PIC, le label sert à reperer un endroit du programme.
On s'en sert pour executer directement la partie de programme qui suit, sans executer la partie concernant les interruptions. S'utilise avec l'instruction goto Debut
Le nom "Debut" est donné par le programmeur, on aurait pu mettre "fleur", ou ce que vous voulez!movlw D'244'
movwf temp2: On met la valeur 244 dans la variable temp2. La variable temp2 permet d'executer 244 fois un retard de 256 * 4µs avant de faire changer d'etat la LED. Une fois que la LED a changé d'etat, il faut donc reinitialiser la variable temp2 à la valeur 244.Boucle: C'est un label. Il sert à reperer un endroit du programme.
nop: simgnifie "no operation". C'est une instruction qui ne fait rien. En fait elle permet d'occuper le processeur, donc de creer un retard. Comme le temps de cycle est 1µs, ce retard sera d'1µs.
decfsz temp1,1
goto Boucle: décremente la valeur la variable temp1 (qui vaut 0 la premiere fois). Si apres la decrementation temp1 n'est pas nulle, le programme execute l'instruction suivante, donc retourne au label Boucle. Sinon, le "goto Boucle" est sauté, et c'est la commande qui suit qui est executée:
remarque, le ",1" a la fin de decfsz signifie qu'on met le resultat de l'operation dans temp1. Si on mettait decfsz temp1,0, le resultat serait mis dans Wdecfsz temp2,1
goto Boucle: décremente la valeur la variable temp2 (qui vaut 244 la premiere fois). Si apres la decrementation temp2 n'est pas nulle, le programme execute l'instruction suivante, donc retourne au label Boucle. Sinon, le "goto Boucle" est sauté, et c'est la commande qui suit qui est executée:comf PORTB,1: permet d'inverser l'etat des sortie du port B. Toutes les sortie qui etaient à 0 passent à 1, et toutes les sorties qui etaient à 1 passent à 0.
Dans notre cas, seule la patte 6 du PIC changera d'etat.goto Boucle: retourne au label "Boucle" (voir plus haut). le programme tourne donc en rond.
end: Il est indispensable pour le compilateur.
Pour bien assimiler le fonctionnement du programme, voici un petit résumé du fonctionnement:
~ Supposons que la LED soit eteinte.
~ Pendant 0.25 secondes, le PIC va executer l'instruction goto Boucle, ... .
~ Au bout de ces 0.25 secondes, la temporisation est finie, et le PIC va allumer la LED
~ Le PIC va de nouveau executer l'instruction goto Boucle pendant 0.25 secondes.
~ la LED va s'eteindre.
~ Et ainsi de suite.Commentaires:
C'est une methode simple pour faire une temporisation, mais nous verrons qu'il y a beaucoup mieux dans l'exemple3.
Quelques définitions:
temporisation de démarage: le PIC attend 72 mS avant d'executer le programme lorsqu'on l'allume. Ceci permet d'attendre la stabilisation de l'oscillateur.
Chien de garde (WDT): C'est une fonction du PIC qui permet de savoir si une instruction dure "trop" longtemps (peut etre désactivé).
Oscillateur à quartz: voir le schema. Pour fonctionner, le PIC a besoin d'une horloge, et là l'horloge est réalisée avec un quartz 4 Mega Hertz et deux condensateurs.
Configurer le PIC: Lorsqu'on configure le PIC, on dit quelles pattes sont en entrée, quelles autres sont en sortie, ....
PORTB: c'est un registre (variable) de 8 bits qui contient les etats des sorties du pic. Par exemple si PORTB = B'00010011', les sorties 1, 2, et 5 (pattes 6, 7 et 10) sont au niveau logique "1", les autres sont à zero.